Today all four of us got together and began building the final car. We got our 3D parts today, images shown below.


The L bracket fit very tightly onto the front of the motor and we cannot take it off without it potentially breaking. The other bracket slides on nicely, however the holes on the two pins do not line up the way we wanted them to, so we might need to drill through one of the brackets to fit a bolt through it.
We were able to slide a zip tie through the screw holes so we were able to at least get the car built and running. The following image is of the car that we built.


Right now, the left motor is spinning a little faster than the right one so the car does not go straight forward or backward. We are going to bring the car to Prof. Thompson tomorrow to see if there is anything that he can do to help us get it to drive straight. The batteries are pretty low right now so the car is not running at full power in the video.
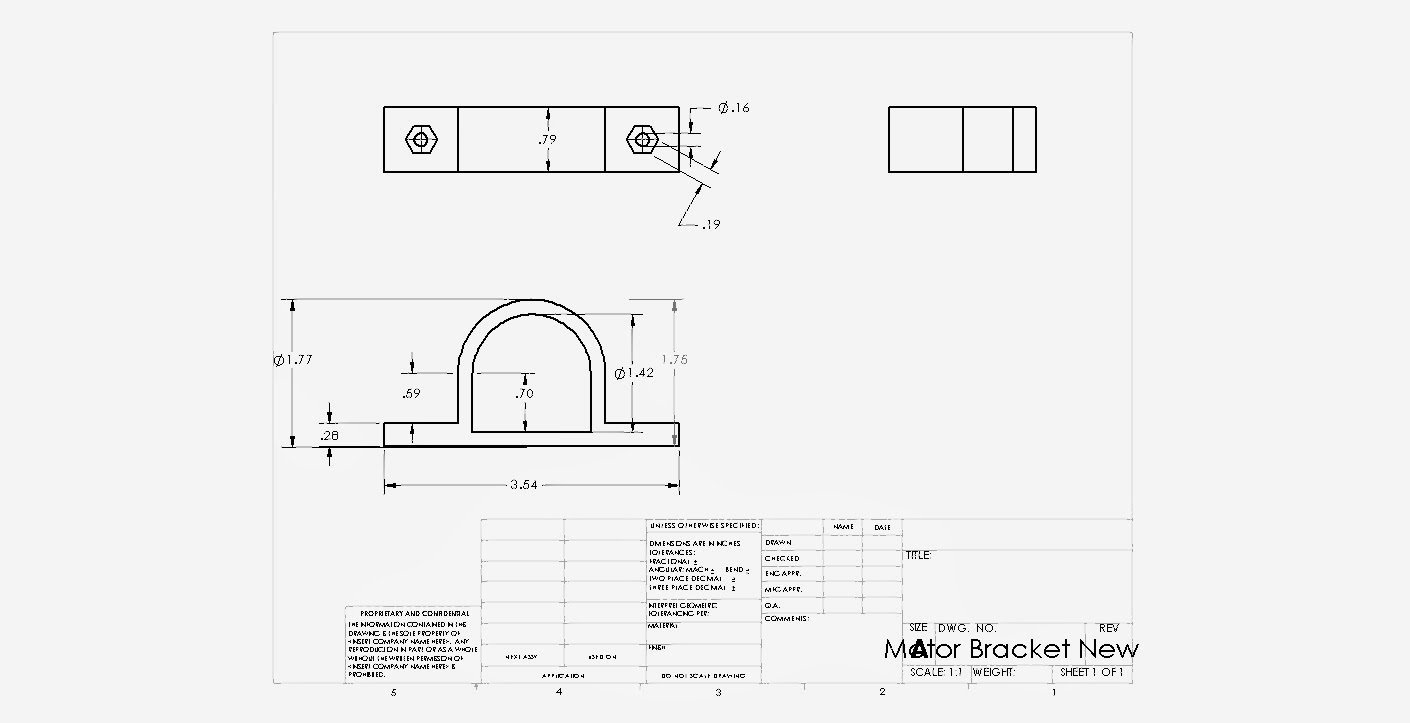
The following images are the drawings of the two brackets and the car frame that we got cut and printed.


In total we worked for about 3 hours.
No comments:
Post a Comment